
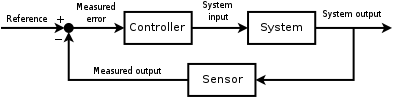
Last week I worked really hard to implement a Feedback Control Loop in our shiny new robot. The main goal of this module is to make the robot move as nice and fast as possible . It wasn’t too hard to do, but as I wanted it to have a neat and configurable design, sketching took as much time as coding did.
Anyway, the result speaks for itself :
Next time we should be more careful with the power supply cables ^^ :
I’ll talk about the technology decisions and previous work and papers about this subject in following posts.